Research Movies
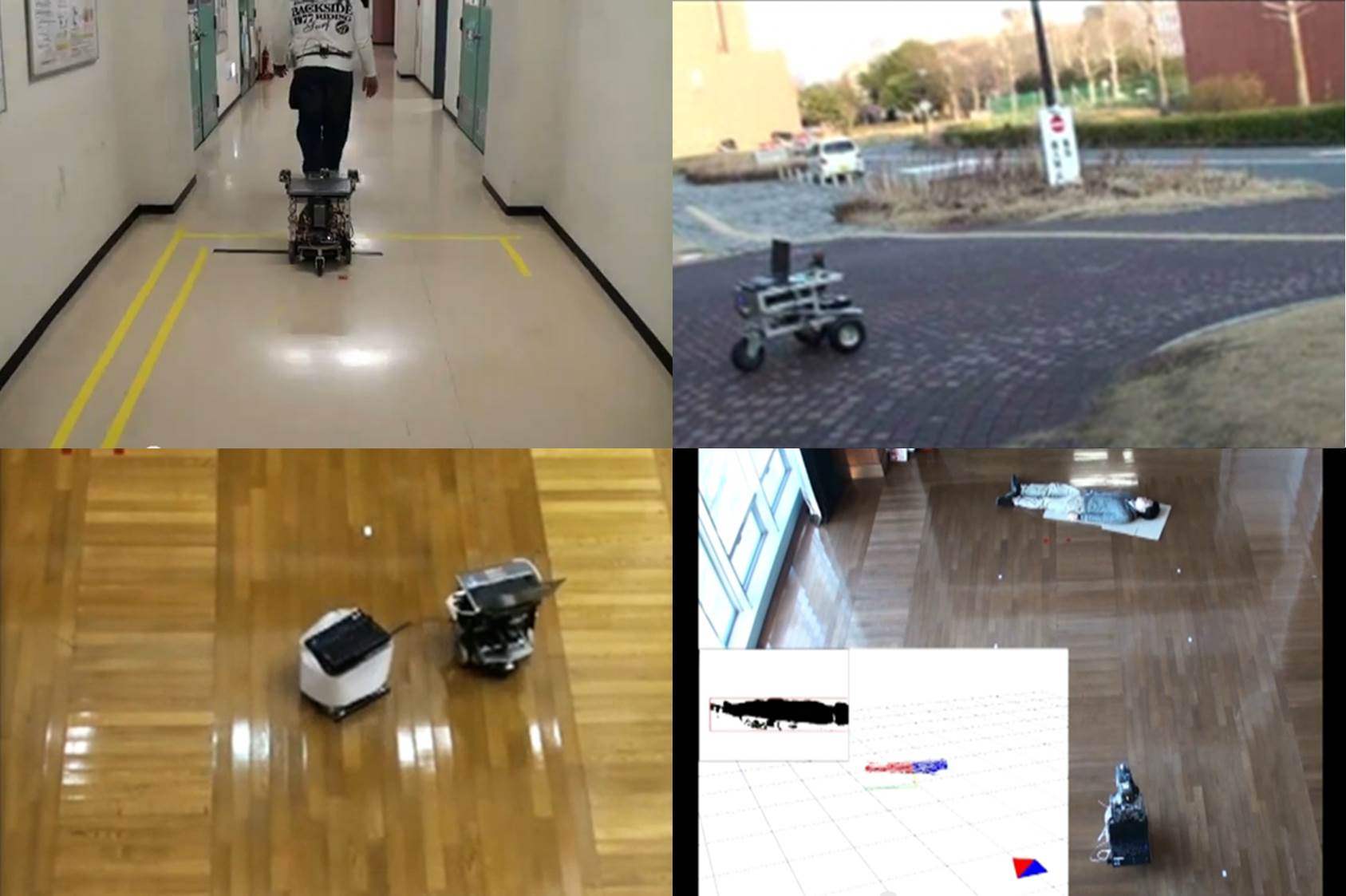
Videos of current and past researches conducted in our laboratory

Winning Entries of Demo Program Contest
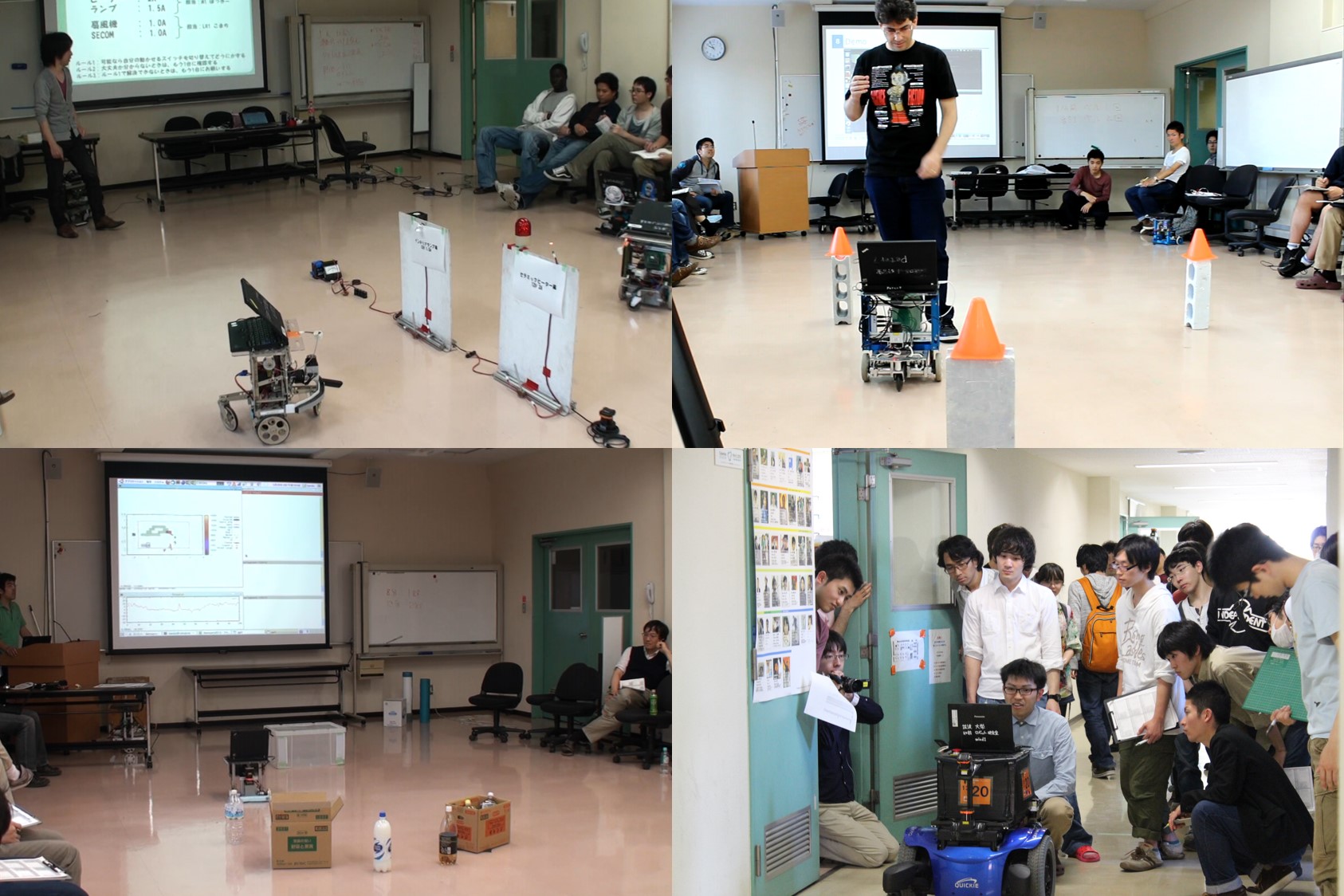
Videos of winning entries from our lab's yearly demo programming contest
Videos of current and past researches conducted in our laboratory
Videos of winning entries from our lab's yearly demo programming contest