研究の目的

筑波大学知能ロボット研究室では、自律的に動いて人間生活をサポートする機械(ロボット)のための技術の研究・開発を目的として活動をしています。
現在、科学技術の進歩に支えられて、大きな力を出す機械や高速で動く機械、あるいは微細な作業をする機械など便利で有用な機械が次々と開発され巷にあふれています。しかし、これらの機械は、機械が動くために整備された環境の中にいてはじめて大きな力を発揮するのが普通です。これに比べ、人間や動物は環境の中で仕事をこなして目的を達成します。この人間や動物が持っている、柔軟性や適応性、頑強性と確実性を自動機械に与え、それによって、信頼して仕事を任せられる有用な機械を実現すること。これが私たちの研究の目的です。
いわゆるIT技術が大きく進歩した現在、情報の伝達・処理・蓄積の仕事は、その多くの部分をコンピュータに任せられるようになっています。その便利さを、実世界の中の作業においても現実のものとしたい。私たちの研究目的はそのように表現することもできます。
この目的のために、まず、建物の中や野外で与えられた目的地まできちんと走行し、必要な作業を行う移動ロボットを例として、それを実現するための技術を中心として研究開発を進めています。
アプローチ:研究の方法

ロボットが働くべき世界は、コンピュータや概念の中に抽象化された世界ではなく、現実の世界です。現実の世界は私たちの想像以上に複雑であり、簡単なモデル化は不可能です。したがって、ロボットのシステム統合技術や個々の要素技術を研究し開発する時は、それが実際にどのように働き、またどのような限界があるかを、現実の世界に適用してみることによって評価しなければなりません。実際に具体的な問題に適用してみることではじめて発見される問題点は限りなくあり、また実際に適用することによって解決法が見出されることも少なくありません。この立場でのロボットの研究開発はできる限り現実的な環境の中で実験を繰り返しながら進める必要があります。この「実世界の中での実験」、これが私たちの第一の方法論です。このアプローチを私たちは実験科学としてのロボット工学、あるいは、「実験ロボット学」と呼んでいます。
実世界できちんと働く有用なロボットを実現するためには、個々の要素技術は勿論重要です。しかし、要素技術からはじめるアプローチだけでは、どのような要素技術が本当に必要かを知ることはできません。そこで、私たちは、まず、ロボットが実現するべき作業(動作、タスク)とロボットが働くべき環境を具体的に決め、その作業を実現するロボットを実際に構成し、その過程で必要となる要素技術を明らかとして、その技術を開発する、というアプローチをとっています。これが私たちの研究における二つ目の主要な方法論です。私たちはこれを「タスクオリエンテッドアプローチ」と呼んでいます。
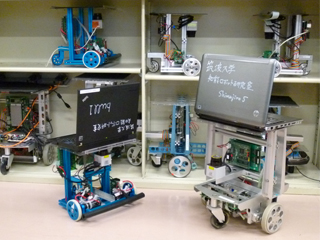
これらの方法論によって研究を進めるには、実験研究の道具としてのロボット(ロボットプラットフォーム)が必要です。私たちは、そのために、ロボットの研究のための実験用プラットフォームとしての移動ロボットを開発・製作しています。このプラットフォームは私たち自身が研究の道具として使うためのもので、「山彦」と名付けられています。
研究用プラットフォームとしての自律ロボット「山彦」
プラットフォームとしてのロボットをいろいろな研究の目的に使うためには、各部に標準的な技術を用いることと機能の拡張性が重要です。
「山彦」は、機能の拡張性、ならびに、実験の容易さとその際の安全性を両立させることを意識して開発されています。「山彦」にはいろいろなバージョンがありますが、その標準機は約30cm立方+αの大きさで15kg程度の重量をもつ2つの駆動輪による車輪型移動ロボットです。
現在、私たちの研究室には35台の「山彦」があり、いろいろな研究のために使われています。個々の「山彦」は各々独立した研究の目的に用いられているので、結果としては1台ずつに研究課題に応じた個性があります。しかし、基本的にはすべて同じ機構とハードウェア・ソフトウェアの構成を有しており、それらはできる限りの標準化が図られています。したがって、どの「山彦」上で開発されたハードウェア機能やプログラムも、原則としてそのまま他の「山彦」上に移植して働かせることができます。
研究室の現状

筑波大学知能ロボット研究室には、 現在、4名の教員の下、研究員1名、博士後期課程の学生11名、博士前期課程(修士課程)の学生34名、学類(学部)の学生9名、客員研究員1名が所属し、総勢60名という大人数で研究を進めています。各人が独立の研究テーマを持っており、その各々がこの分野の小さな進歩に寄与しています。そして、その全体を外から見たときに、大きな成果と認められるものにしていきたいと考えています。
ロボット技術は、その成果を直接産業に適用するのは難しく、また、一般に語られる程簡単に「夢」のロボットに近づいて行けるものでもありません。しかし、ロボット工学には目的をクリアにしやすく、しかも成果について評価しやすいという特徴があります。したがって、学部生や大学院生の技術の習得あるいは研究開発のトレーニング法としては、極めて良い方法です。私たちは、この研究室で卒業研究や大学院の研究をしていった学生達は皆、確実な技術力や研究開発のための力を身に付けていると自負しています。
沿革
1976年、電気通信大学計算機科学科において、金山裕教授(その後米国に渡り Naval Postgraduate School 教授、現在 MotionLab, LLC 代表取締役)が飯島純一助手とともにおこした移動ロボットのプロジェクトが母体です。1977年に金山教授が筑波大学電子情報工学系に移り、筑波大学の自律移動ロボット『山彦』プロジェクトとなり、さらに1978年に油田信一講師(現在、教授)が同プロジェクトに参加しました。金山教授は1984年に渡米され、油田教授がその後を引き継ぎました。1992年に大矢晃久助手(現在、教授)が参加し、さらに1994年に坪内孝司講師(現在、教授)(1988年に本研究室で博士号の学位を取得)が参加しています。その後2012年に、油田教授は定年退職されました(現在は客員研究員として在籍)。