筑波大学 知能ロボット研究室
English
トップ
サイトマップ
概要
メンバー
研究テーマ
論文
ムービー
行事
交通アクセス
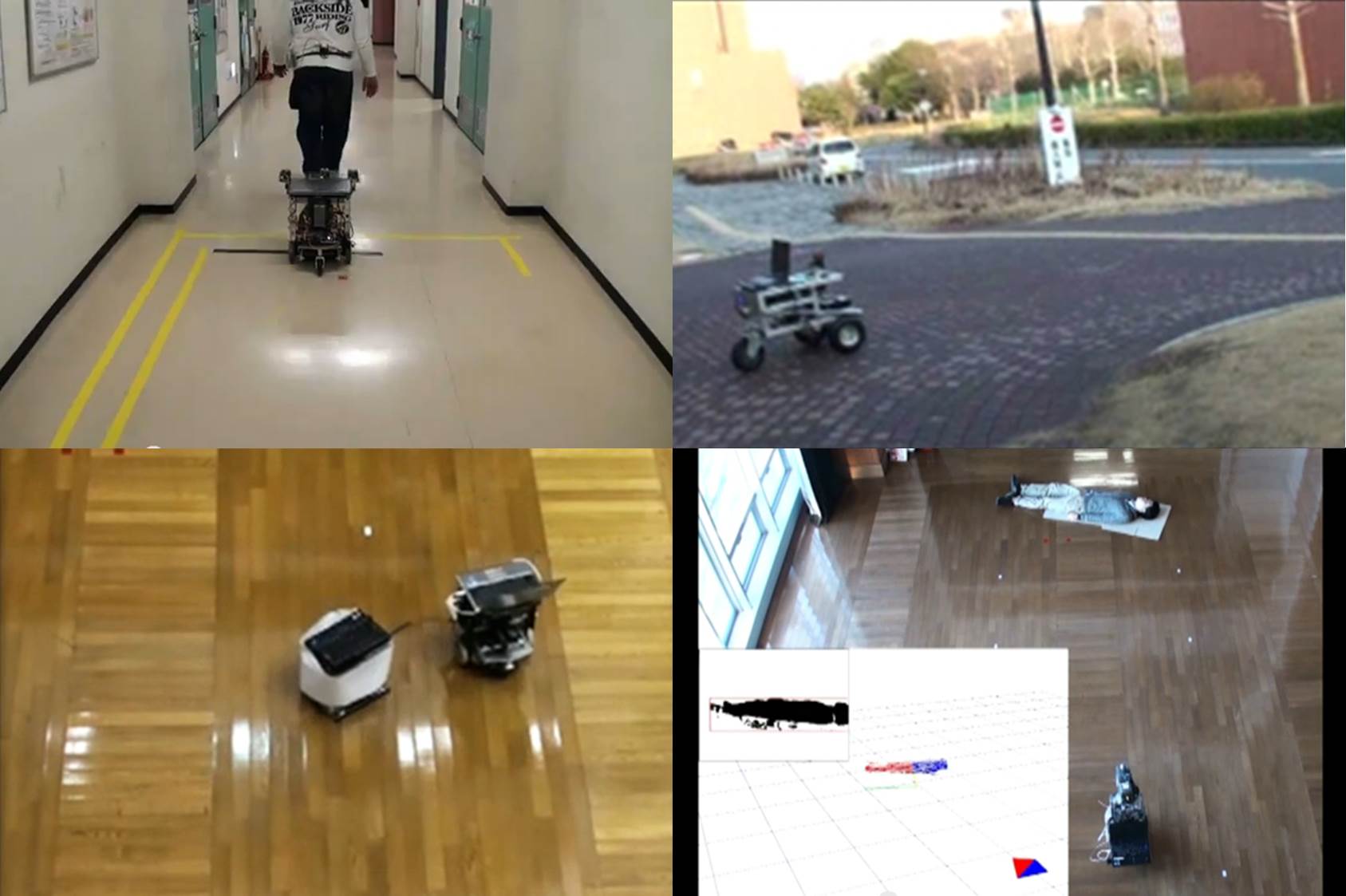
研究実験ムービー
研究室で過去に行われた研究実験に関する動画を公開しています。
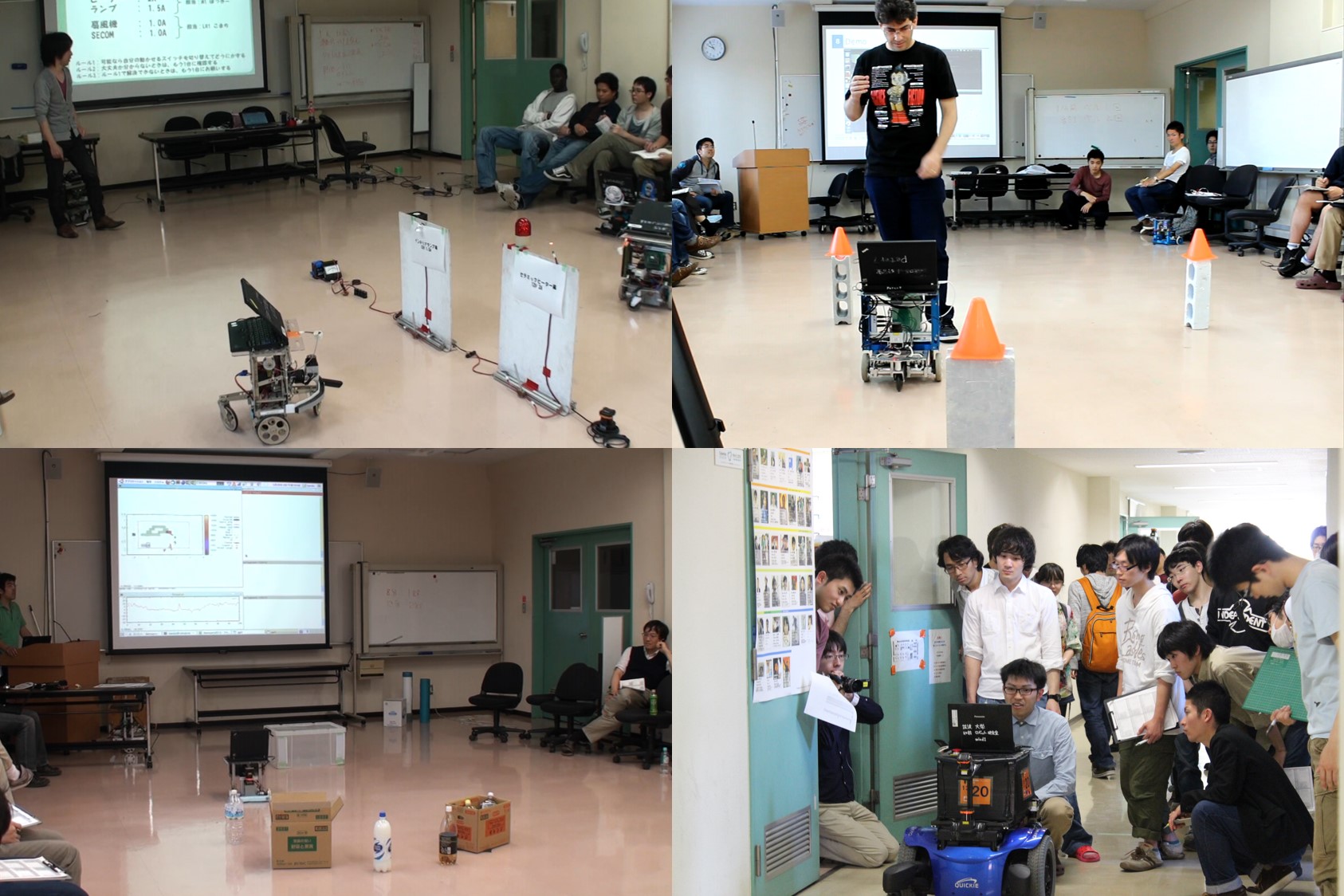
山彦デモプログラミングコンテスト入賞作品
研究室メンバー全員参加による「山彦」を使ったデモプログラムのコンテストにおける入賞作品の動画を公開しています。